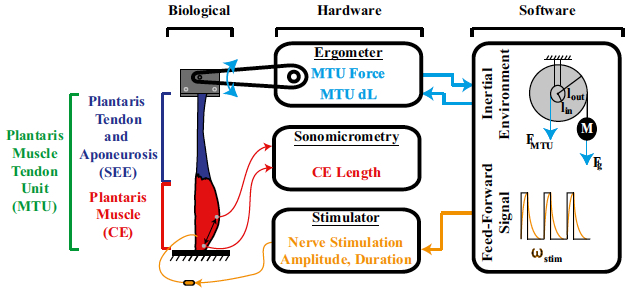
North Carolina State University (NC State) researchers have developed a bio-inspired system that models how human leg locomotion works, by using a computer-controlled nerve stimulator (acting as the spinal cord) to activate a biological muscle-tendon.The findings could help design robotic devices that begin to merge human and machine to assist human locomotion, serving as prosthetic systems for people with mobility impairments or exoskeletons for increasing the abilities of able-bodied individuals.The model is based on the natural spring-like physics (mass, stiffness, and leverage) of the ankle’s primary muscle-tendon unit (using a bullfrog’s muscle). The system used a feedback-controlled servomotor, simulating the inertial/gravitational environment of terrestrial gait.
Hybrid bio-robotic system models physics of human leg locomotion